微細切削加工の最先端への挑戦
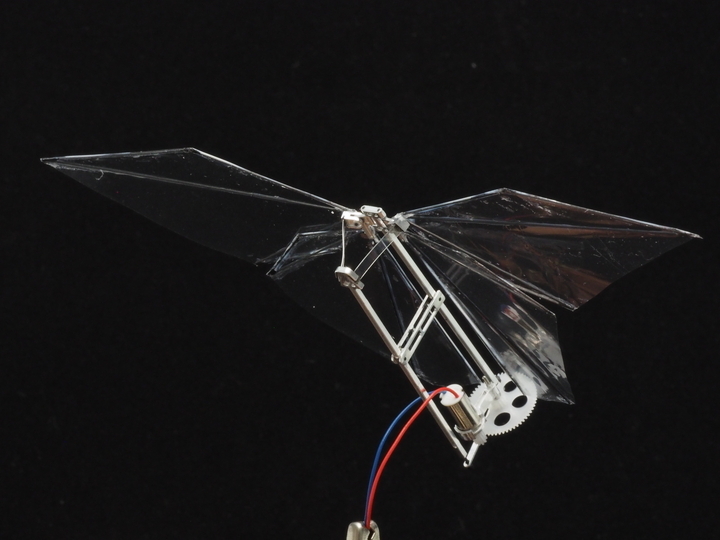
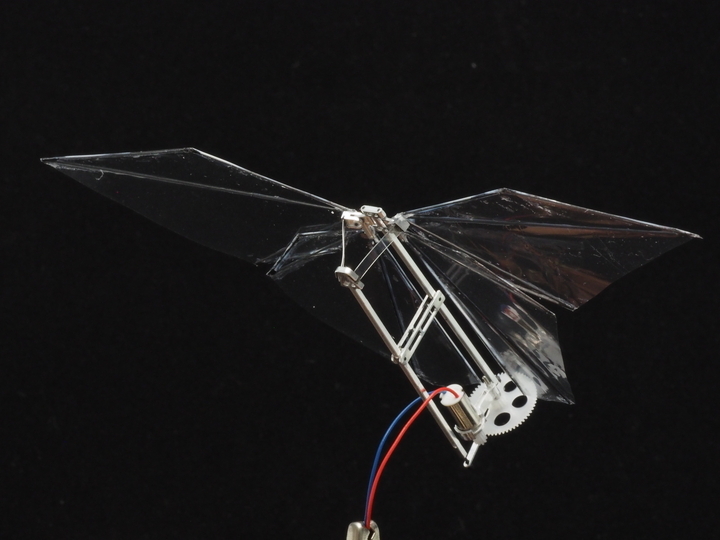
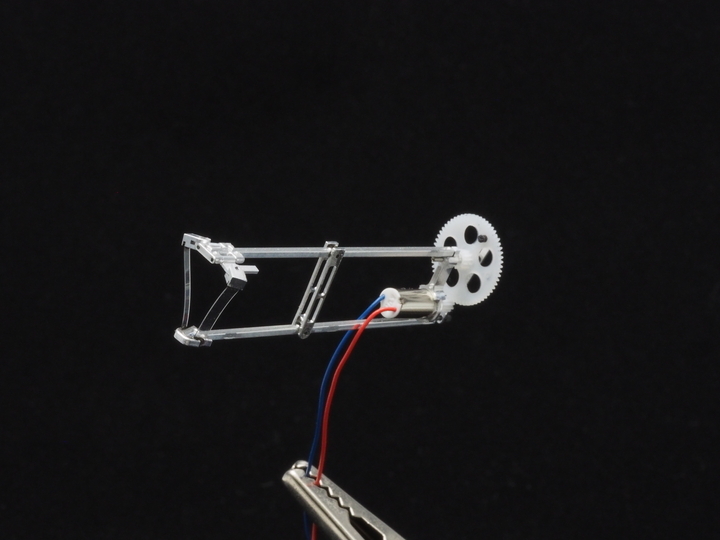
蝶型はばたきロボット
アゲハチョウと同じサイズ、幅100mm程度、質量500mg以下の
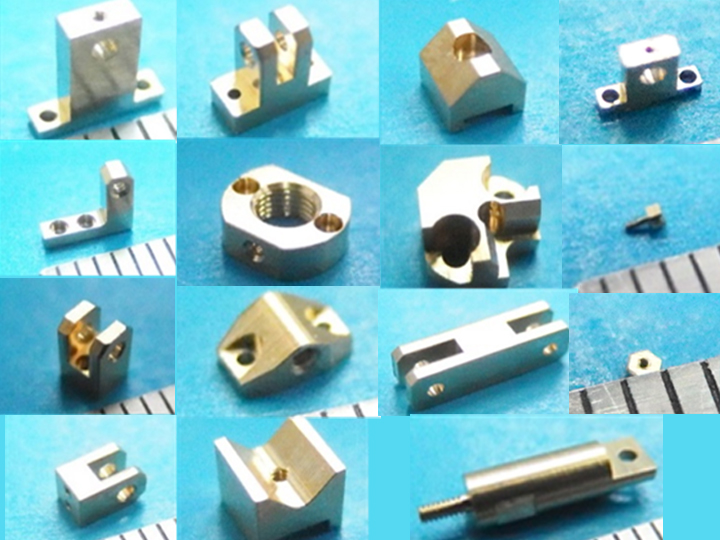
蝶型はばたきロボットの動作を実現する機構を支えるパーツを制作しました。
世界最小のユニバーサルジョイントを使用しています。
従来、カーボンを手作業で重ねて接着し、ピンバイスで穴あけを行っていたため、欠けがでるため、ヒンジ部を厚くする必要があったところ、アルミ切削で一体成型することで、剛性を維持しながらの軽量化に成功しています。
5年以内の製品化を予定しています。
近年、小さな昆虫型の飛行ロボット(ドローン)研究が進められています。
昆虫型のドローンは、災害現場におけるがれきの隙間など狭隘空間での飛行が可能で、
軽量であることから落下時や追突時の危険も軽減されます。
また省エネルギーについても、滑空を行う時間は消費エネルギー0を実現できるなど様々なメリットが論じされています。
しかし、わずか数cm・数gサイズの機体に動力や姿勢制御のための
複数のアクチュエータ、センサなどを搭載する事は困難であり、未だ実用化には至っていません。
東京電機大学の藤川太郎助教らは「アゲハチョウ」をモデルとして飛翔メカニズムを解析。
翅の打ち下ろしで上昇しつつ体を起こし、打ち上げで前進する仕組みすなわち「階段状の飛翔」を実現しています。
・解説論文 「昆虫型はばたき翼系ロボティクス」
日本ロボット学会誌 Vol.34 No.1, pp19-23, 2016(PDF)
東京電機大学 藤川 太郎助教 コメント
一気に設計の幅が広がりました。
これまでは「この大きさの加工ができるかどうか」というサイズの制約の中で各部品の設計を行っていましたが、これからは「作りたいもの」を「作りたいサイズ」で設計することができると感じています。